
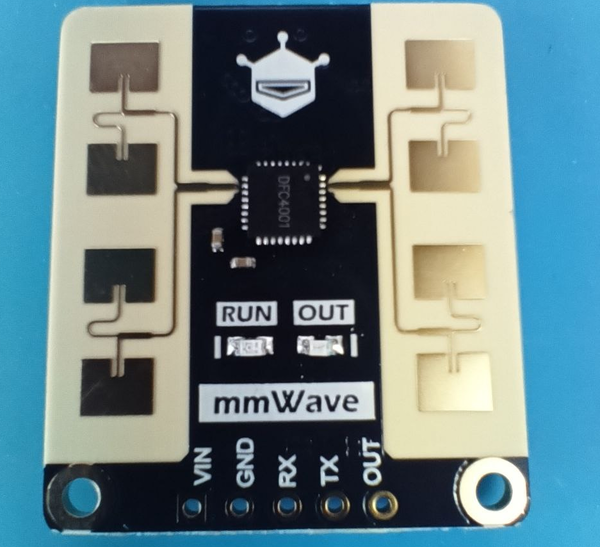
В прошлый раз я подробно рассматривал работу датчика C4001 (25 м) миллиметрового диапазона от компании DFRobot в конфигурации детектора присутствия. Способность этого модуля определять дистанцию позволяет настроить его на активацию в строго заданном радиусе. Однако это устройство может функционировать и как настоящий радар, что открывает новые возможности для проектов.
Когда в зоне обзора оказывается человек, модуль способен замерять два ключевых параметра:
- скорость перемещения цели;
- расстояние от сенсора до объекта.
Весь материал из предыдущей публикации, где был детально описан режим определения присутствия (eExitMode), я повторять не буду. Здесь же я сфокусируюсь на работе датчика в режиме измерения скорости (eSpeedMode).
Для активации этого режима достаточно изменить всего одну строку в коде прошивки:

Полный пример скетча можно найти в документации производителя, а сейчас я сосредоточусь на практическом тестировании. Процесс сопряжен с определенными неудобствами, так как перемещаться вместе с компьютером, к которому подключен датчик, крайне неэргономично.
Много лет назад я собрал специальную тестовую платформу для управления самодельными RC-моделями и проверки различного оборудования в полевых условиях.
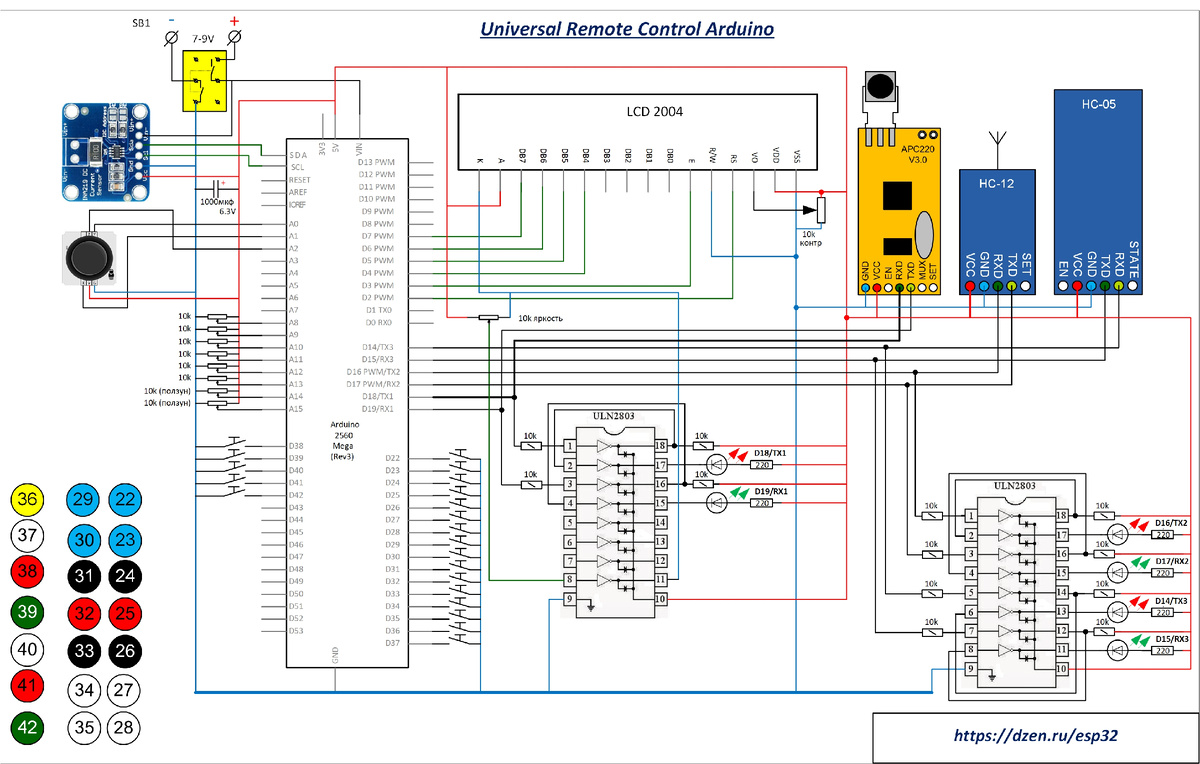
Эта платформа изначально проектировалась для эксплуатации вне помещений. Один из радиочастотных модулей, установленный в системе (HC12), способен уверенно передавать сигнал на открытой местности до 2 км, а также пробивать до 2 метров водной преграды и несколько железобетонных перекрытий.
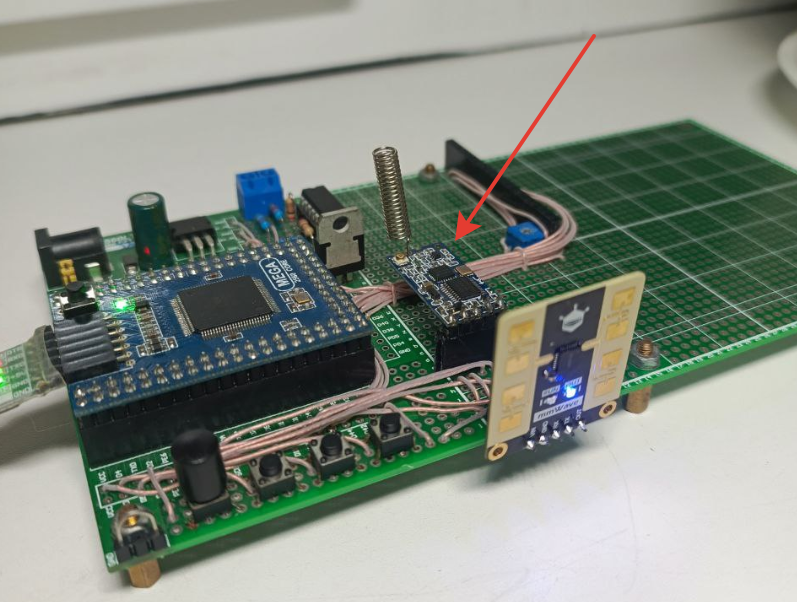
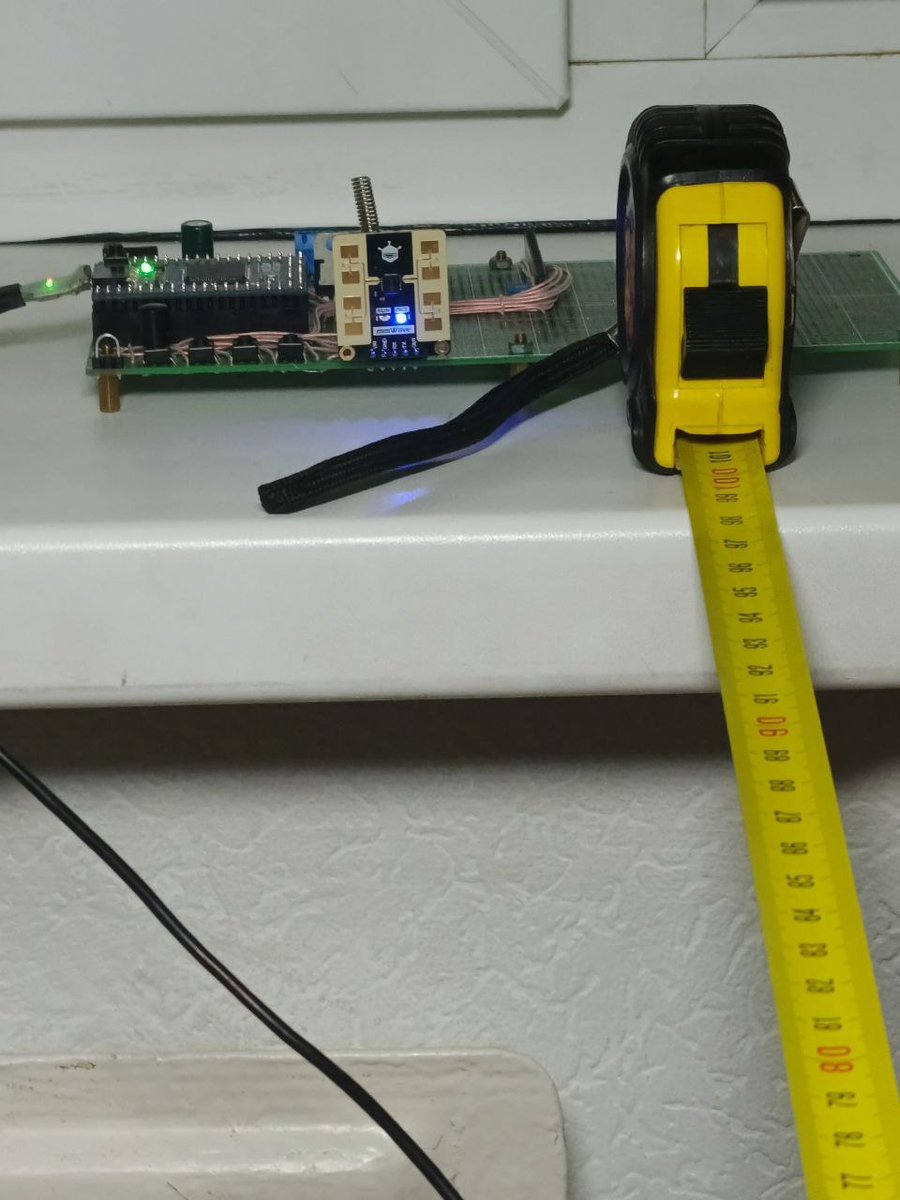
На эту платформу, где уже был закреплен модуль C4001, я добавил разъем для подключения радиомодуля HC12.
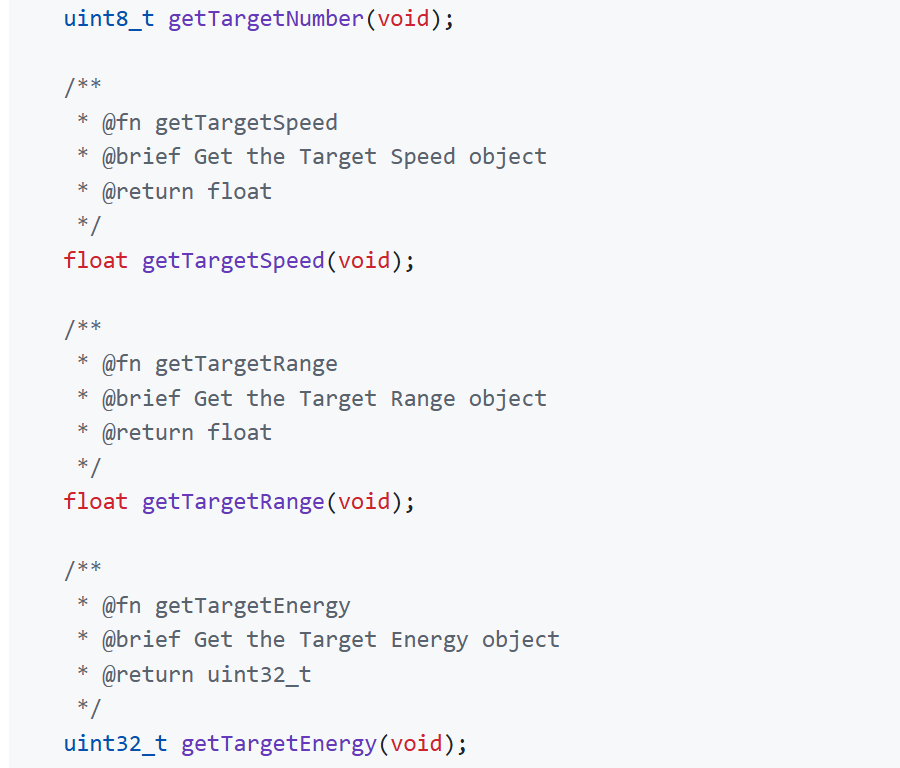
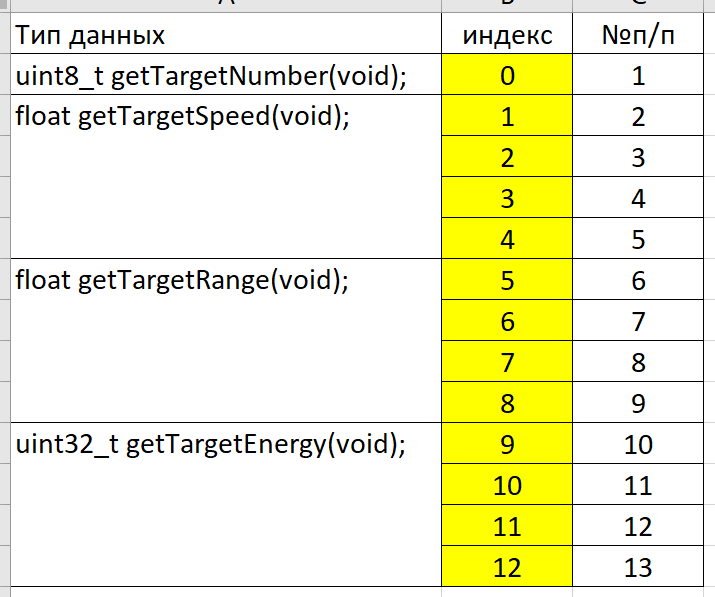
Изучив библиотеку от производителя, я заметил, что весь пакет данных укладывается в 13 байт.
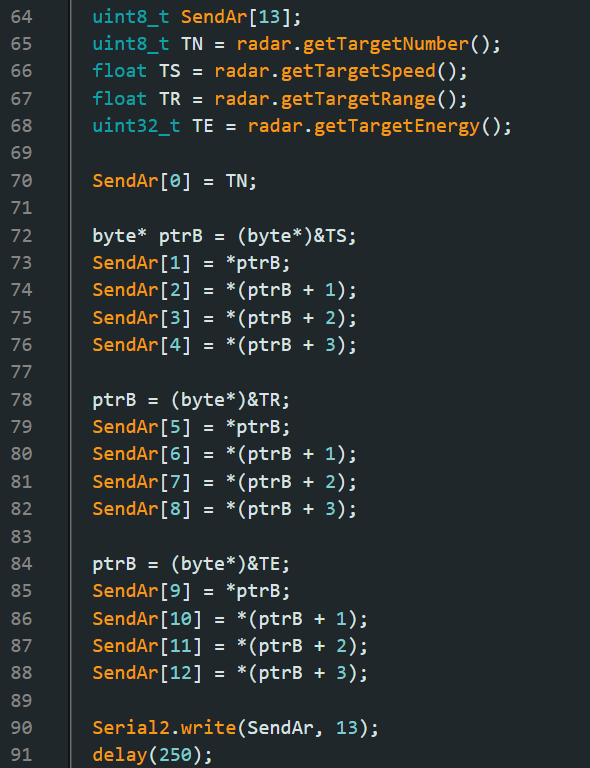
Я настроил микроконтроллер так, чтобы он считывал данные с модуля C4001 и с интервалом 250 мс отправлял их через UART-радиомодуль HC-12 на пульт дистанционного управления.
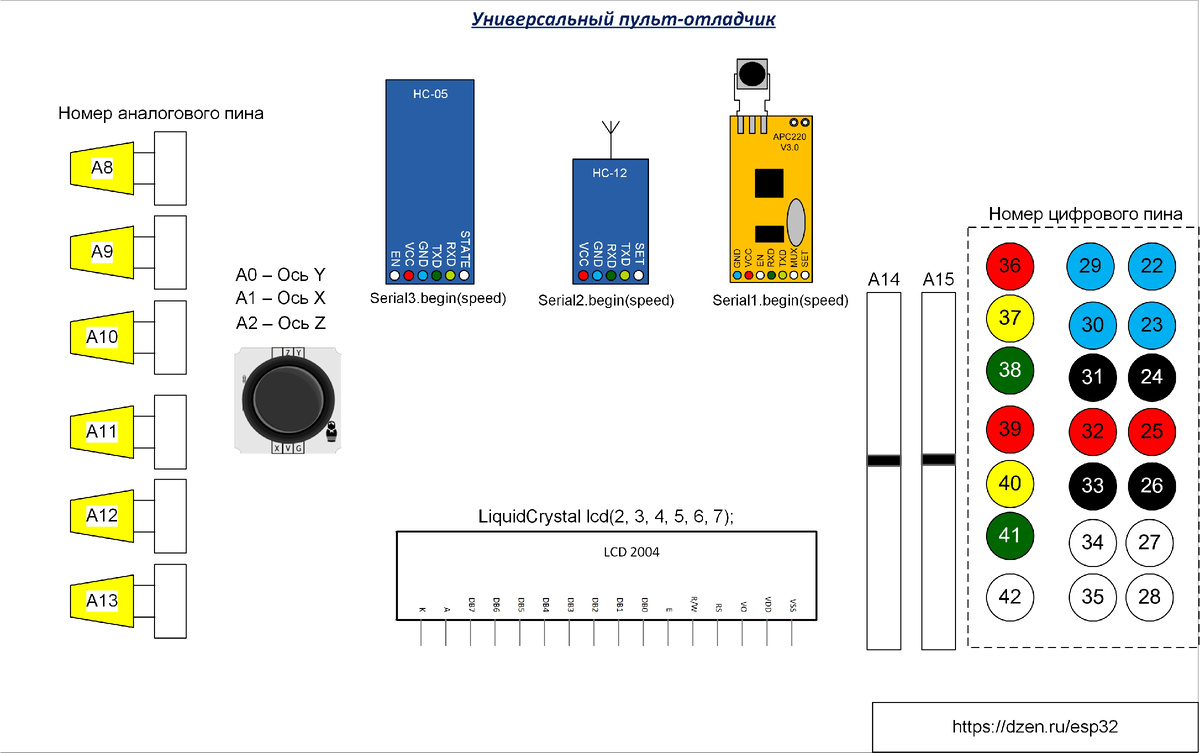
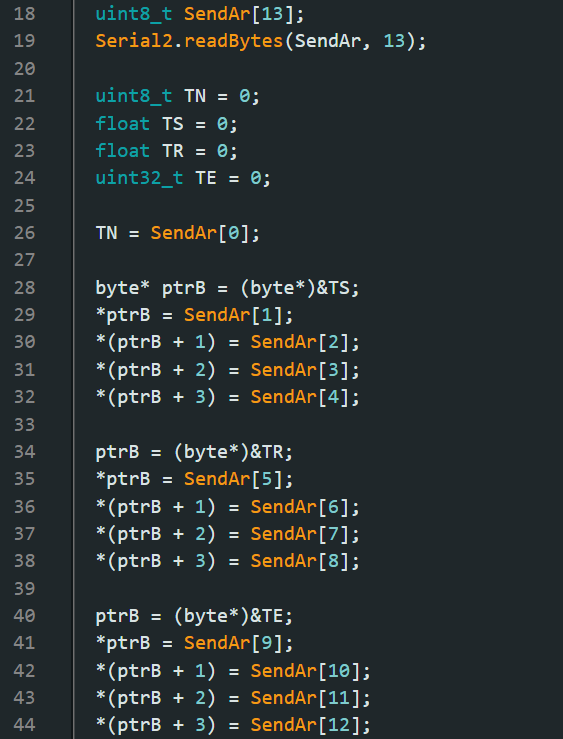
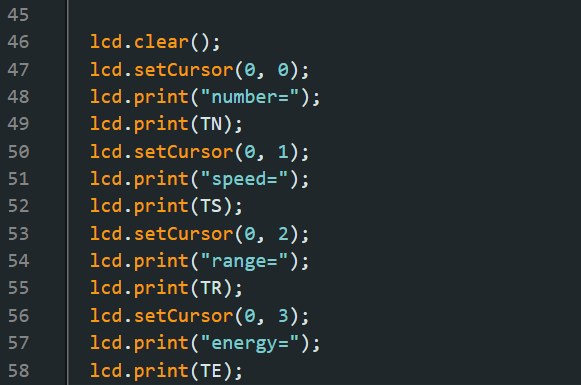
На принимающей стороне, в пульте, я реализовал побайтный разбор входящей посылки, сборку обратно в переменные, после чего информация выводилась на встроенный дисплей.
Запитав пульт от портативного повербанка, я приступил к испытаниям.
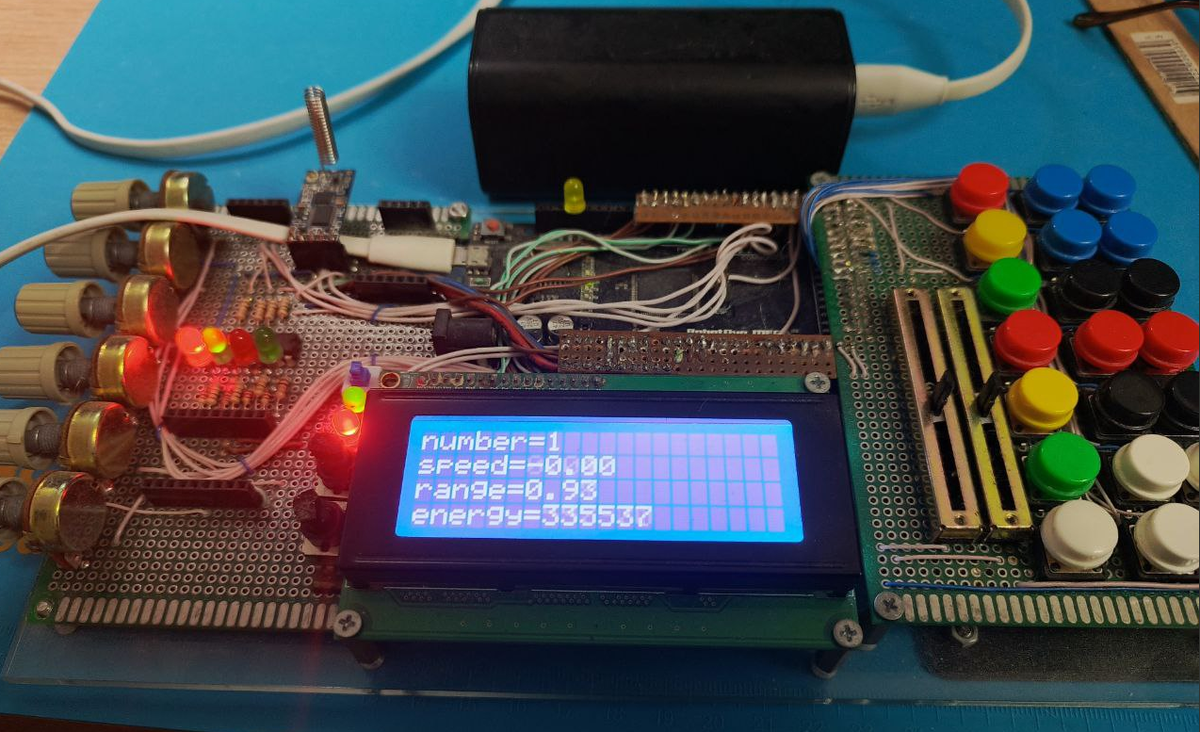
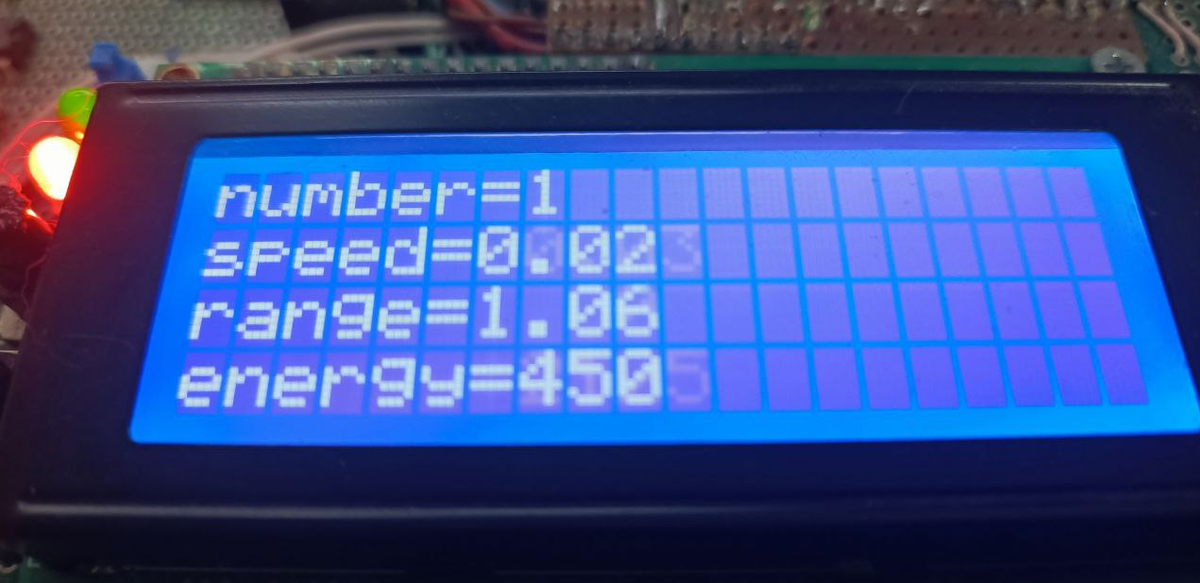
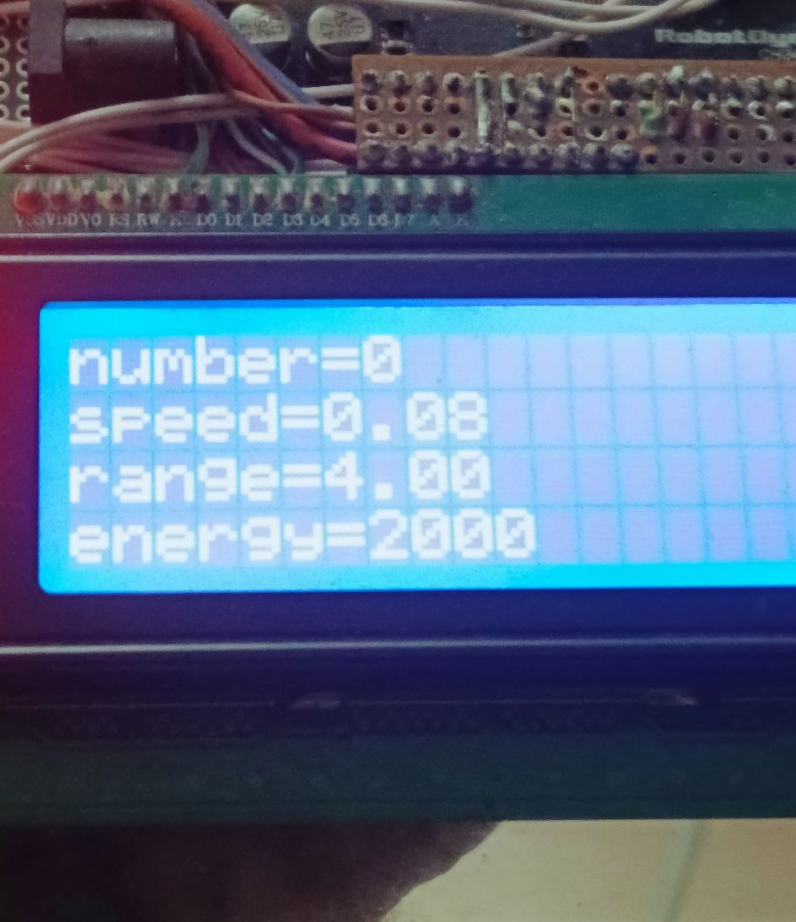
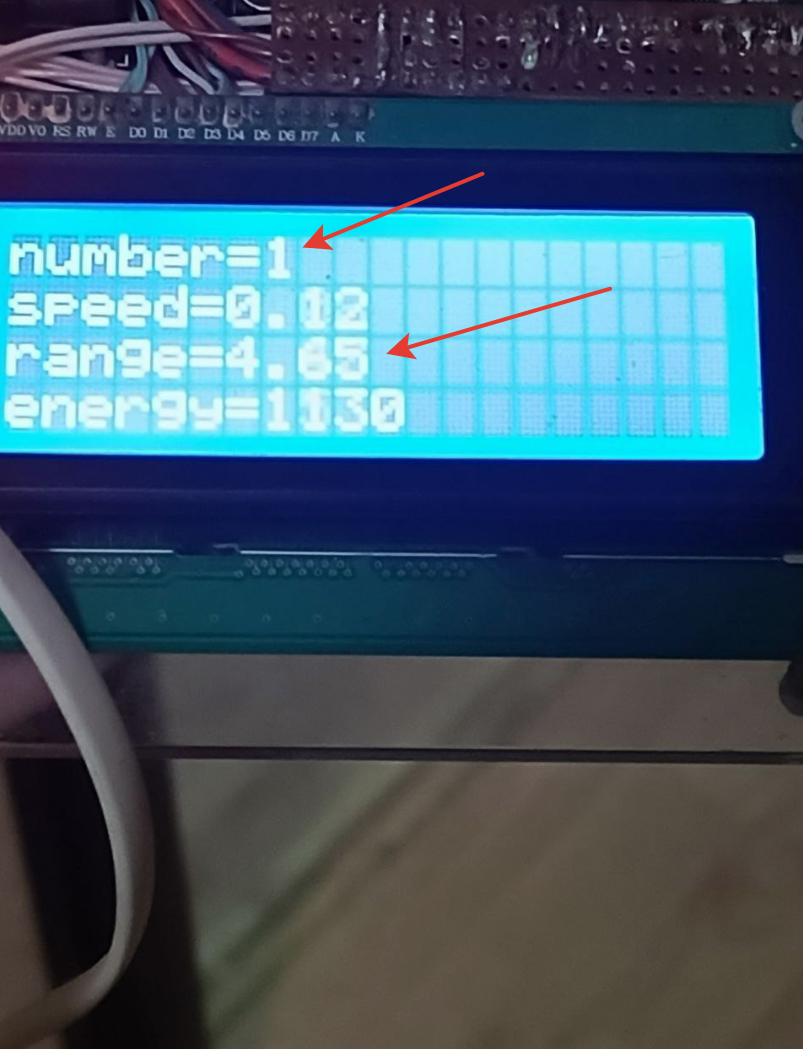
Первые замеры показали, что модуль обнаружил один объект (number = 1), который практически не двигался (speed около нуля) на дистанции (range) примерно 1 метр. Визуально это полностью соответствовало действительности.
Согласно технической документации, данная версия модуля способна отслеживать перемещение только одного человека, поэтому параметр number может принимать значения исключительно 0 или 1. Что касается загадочного поля energy — его физический смысл пока остается для меня не до конца ясным (возможно, это уровень отраженного сигнала, зависящий от массы объекта?).
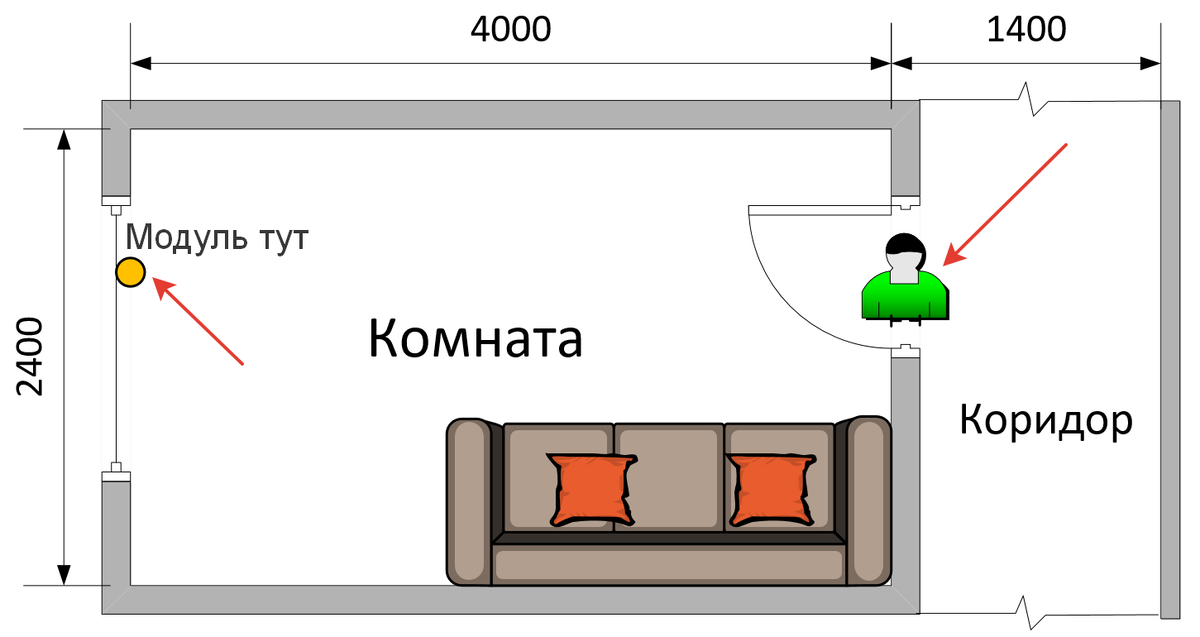
Я переместился с пультом в дверной проем на расстояние около 4 метров от датчика.
Показания дистанции колебались в районе 4.00 метров, что является приемлемой точностью для определения местоположения живого объекта, в отличие от статичной стены.
Затем я спрятался в коридоре за гипсокартонной перегородкой:
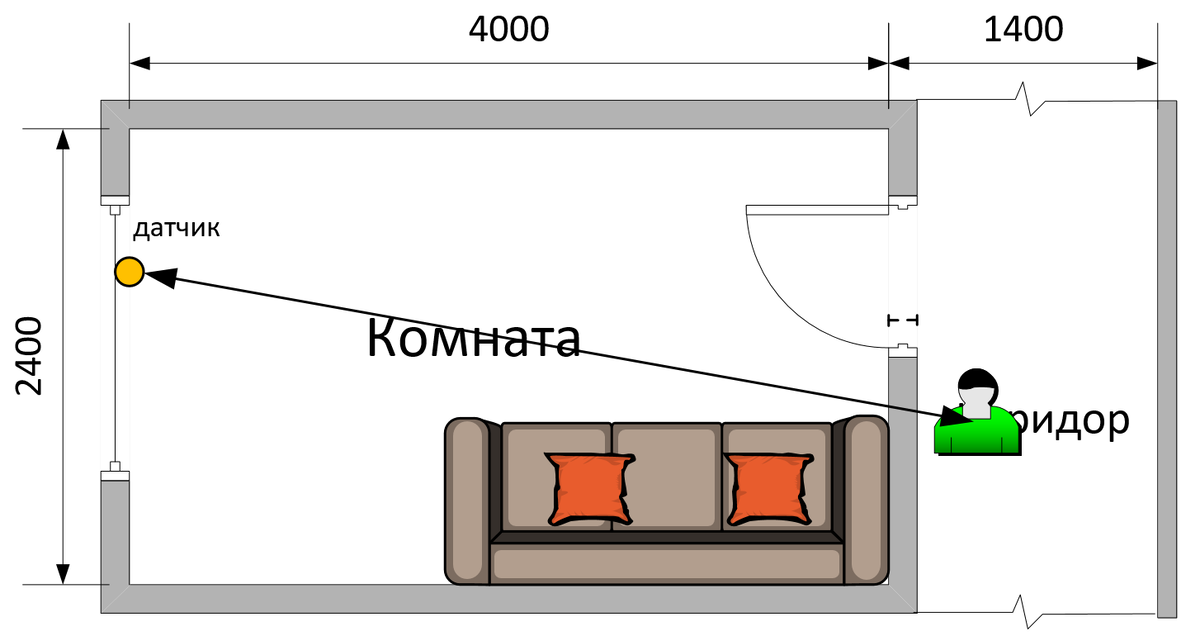
Модуль продолжал уверенно фиксировать мое присутствие, показывая расстояние около 4.6–5 метров, что подтверждает способность радара видеть сквозь неметаллические преграды. Этот функционал особенно полезен для систем безопасности, например, в рамках организации охраны периметра.
Точно замерить скорость в пределах небольшого помещения практически невозможно. Однако я выяснил, что при приближении к датчику значение speed становится отрицательным, а при удалении — положительным. Если установить такой сенсор в длинном коридоре, он сможет не только обнаружить движущегося человека, но и безошибочно определить направление его движения.
Это крайне перспективное устройство. Его способность точно определять расстояние я планирую использовать в своем проекте фотоловушки на базе ESP32-CAM. Благодаря этому камера сможет фотографировать именно лицо человека, а не любые другие части тела, как это было при использовании традиционного PIR-сенсора, который срабатывал на любое движение.
Приобрести данный модуль можно по следующей ссылке:

Купить модуль

Мини РЛС: датчик обнаружения присутствия человека. DFRobot C4001, mmWave, 24 ГГц, 25 метров
Ссылка на предыдущую статью, где радарный датчик использовался в режиме датчика присутствия:
Этот модуль видит сквозь стены
Оглавление канала доступно тут
Всем удачи в ваших проектах!




